Planetary Guidance
System/Tracker

Navigating the stars isn’t just for sci-fi, this Arduino-based star tracker brings celestial positioning to life. Using gyros, stepper motors, an RTC module, and custom 3D prints, this system locks onto stars for precise tracking.
Beyond the build, detailed documentation covers everything from the basics of positional astronomy to design schematics, troubleshooting tips, and a full code repository. Whether mapping constellations or refining guidance systems, this project bridges engineering and the cosmos, one calculated step at a time.

Design & Components
The system consists of the following key elements:
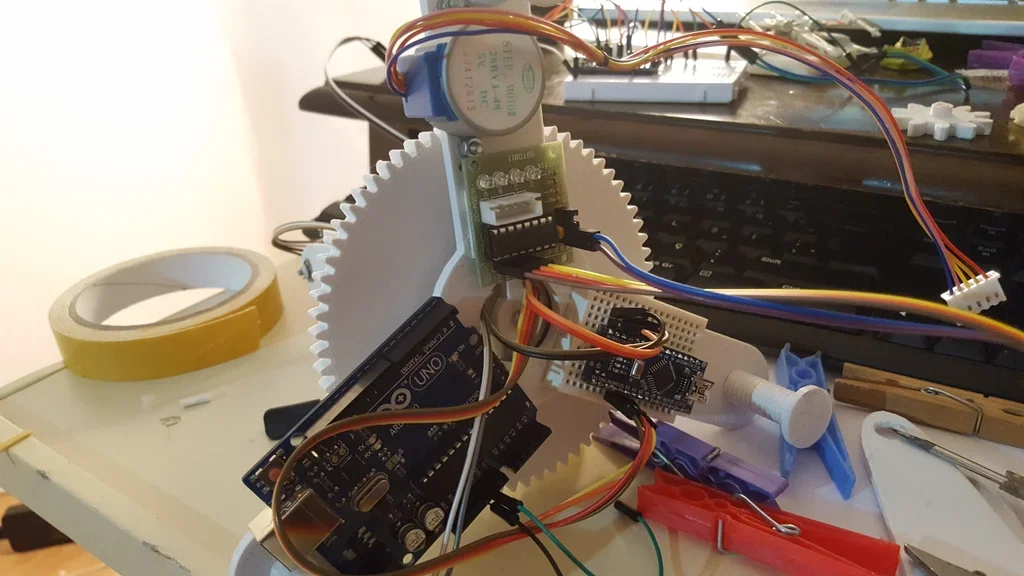
1. Arduino Microcontroller: Serves as the processing hub, executing tracking algorithms and controlling motor movements.
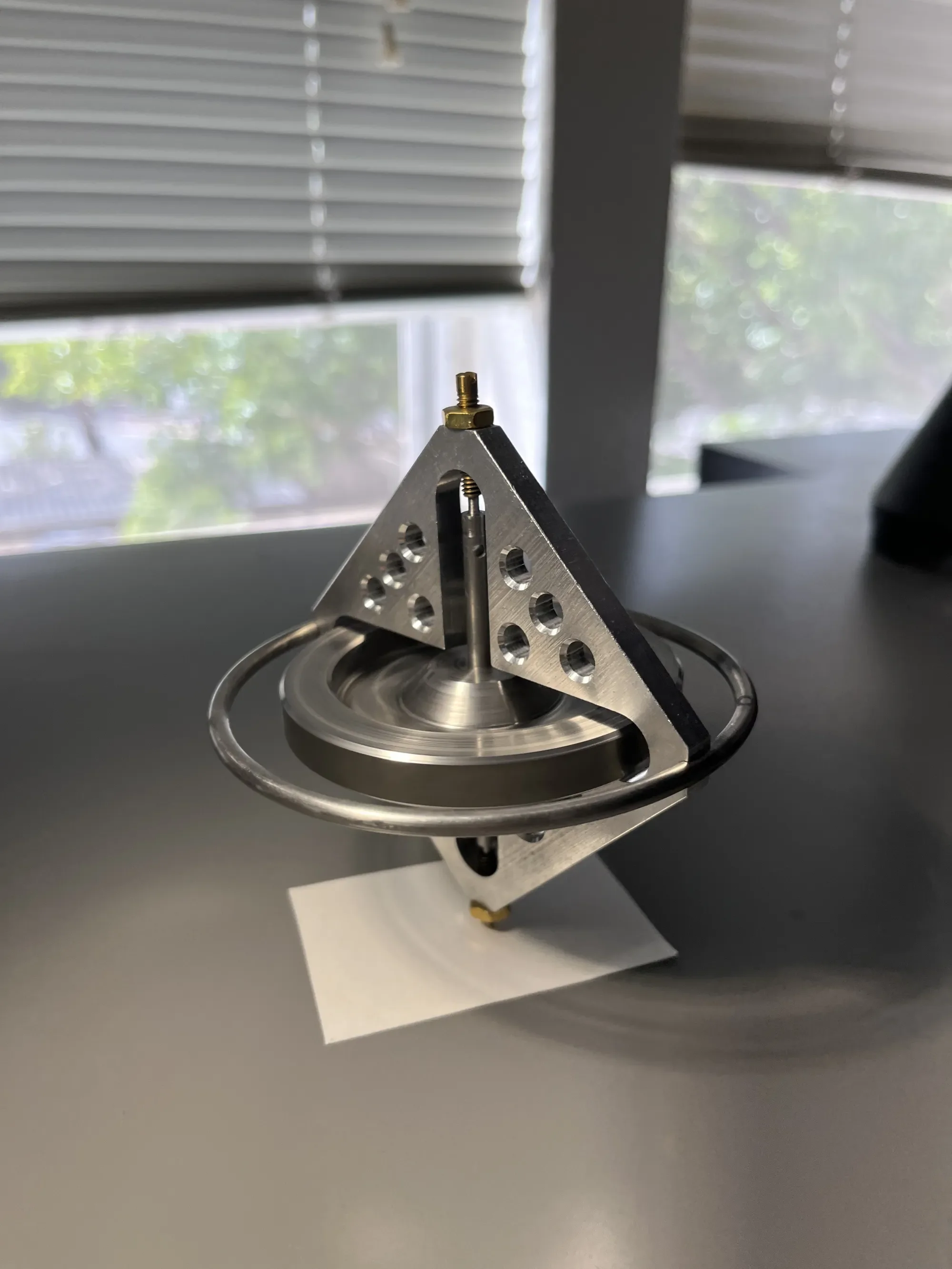
2. Gyroscopes & IMUs: Measure orientation and angular velocity to refine positioning.
3. Stepper Motors: Enable precise movement of the tracker to follow a star’s apparent motion across the sky.
4. Real-Time Clock (RTC) Module: Provides accurate timestamps for celestial calculations.
5. 3D-Printed Enclosure & Mounts: Custom-designed for stability and optimized sensor alignment.
Functionality
Initialization & Calibration: The system reads initial orientation data from the gyroscopes and synchronizes time with the RTC module.
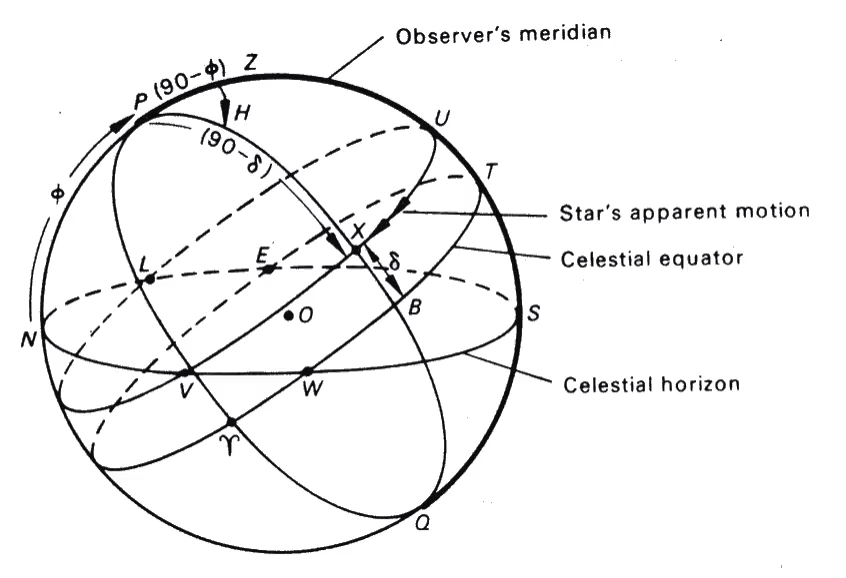
Positional Astronomy Calculations: Using known celestial coordinates and time data, the system calculates the expected position of a target star.
Motor Control & Tracking: The stepper motors adjust the tracker’s orientation to align with the target, continuously adjusting to compensate for Earth’s rotation.
Error Correction: Feedback from the gyroscopes ensures precise tracking, with real-time adjustments to minimize drift.
Applications & Potential
This project demonstrates the feasibility of low-cost, DIY star trackers. Potential applications include:
- Astronomy & Astrophotography: Enhancing long-exposure shots by compensating for celestial motion.
- Satellite & CubeSat Navigation: Providing an entry-level approach to star-based guidance systems.
- STEM Education & Research: Introducing students to positional astronomy and control systems.