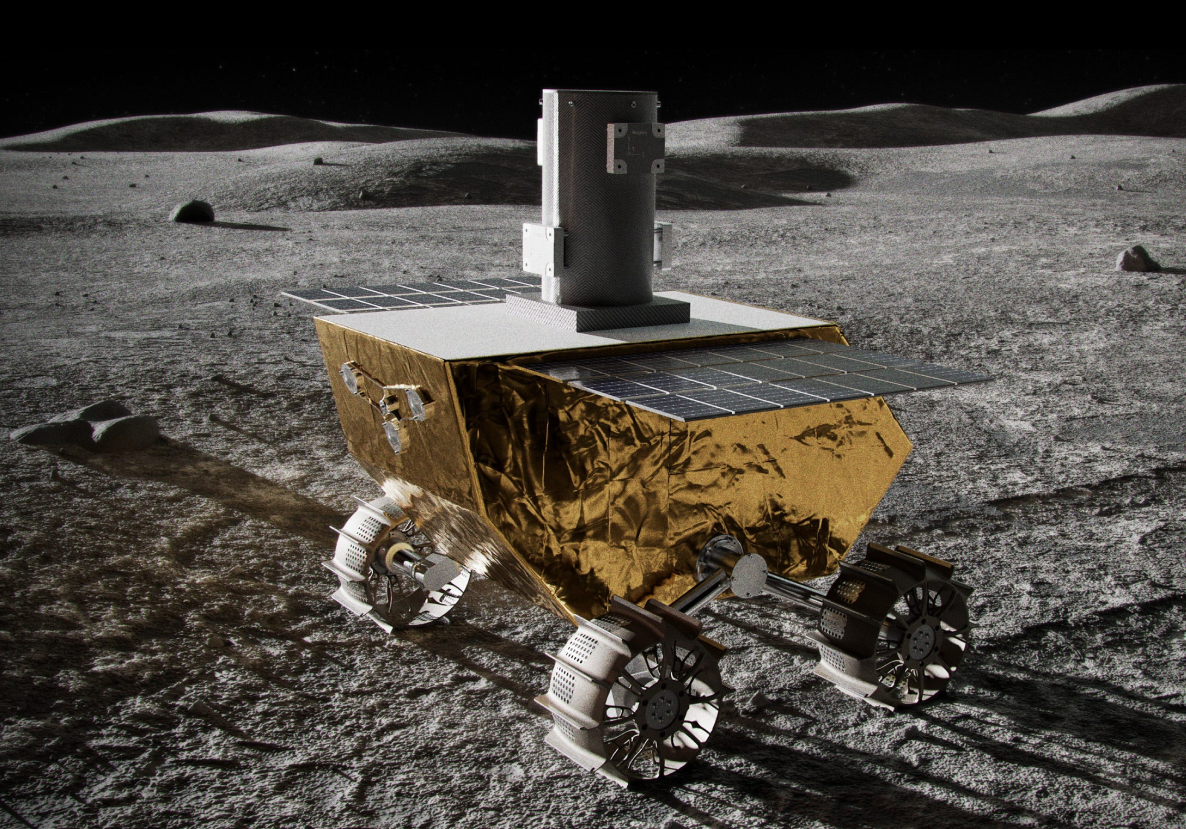
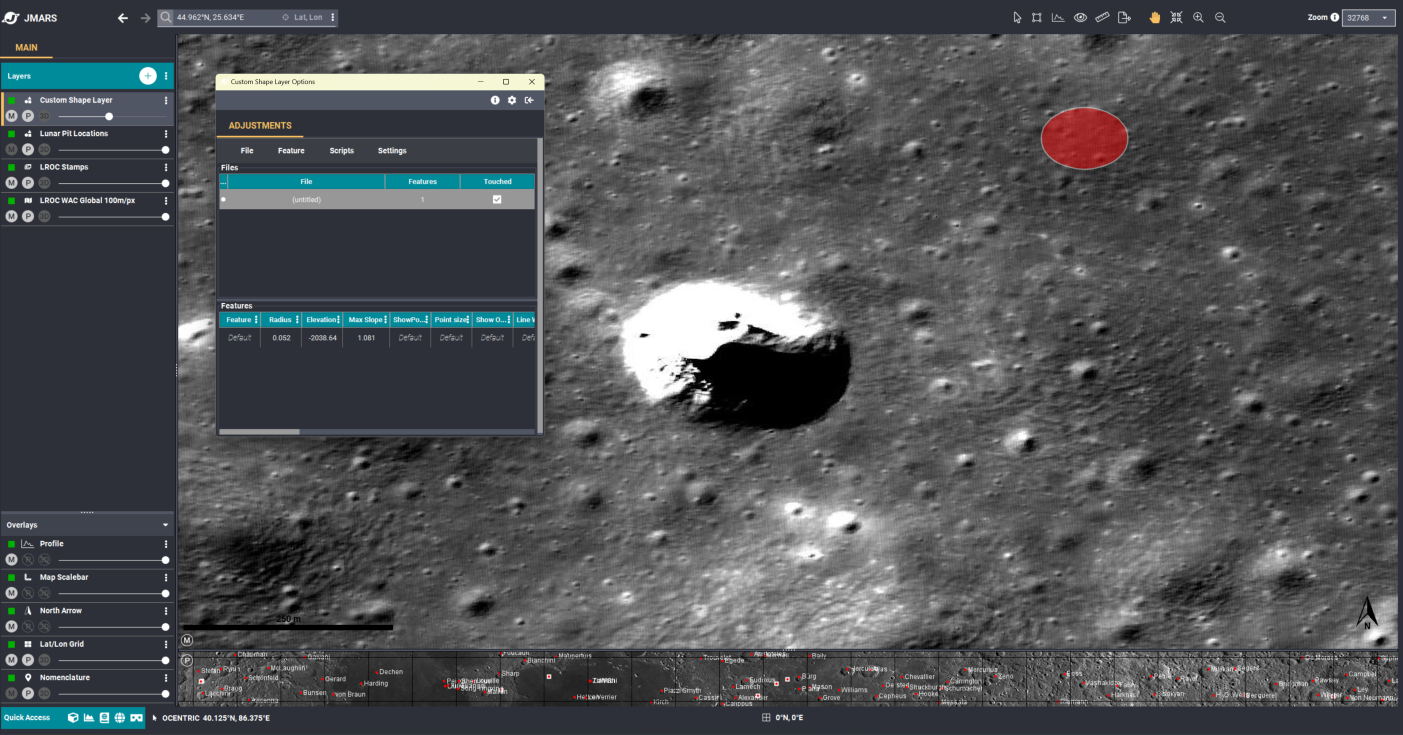
The H.A.R.V.E.S.T. Rover (Habitat Assessment, Resource Validation, and Exploration System Technology) is a Lunar Cave Exploration Mission designed as a precursor for human habitation on the Moon. The rover will assess the habitability and resource potential of the Lacus Mortis Pit, a lunar cave with stable temperatures and a natural entrance ramp.
Its two primary objectives are:
1. Developing robotic exploration capabilities for future lunar missions.
2. Evaluating habitation systems by assessing safety, infrastructure needs, and structural integrity.
Driving Requirements and Constraints:
The mission operates under strict engineering and logistical constraints, including:
- Mass Limit: The rover must not exceed 350 kg.
- Dimensions: The maximum allowable size is 2.0m × 1.25m × 1.25m.
- Budget: The mission is capped at $300M.
- Timeline: The rover must be launch-ready by March 1, 2030.
While the mass, dimensions, and timeline constraints are met, cost reductions or additional funding will be required to stay within budget.
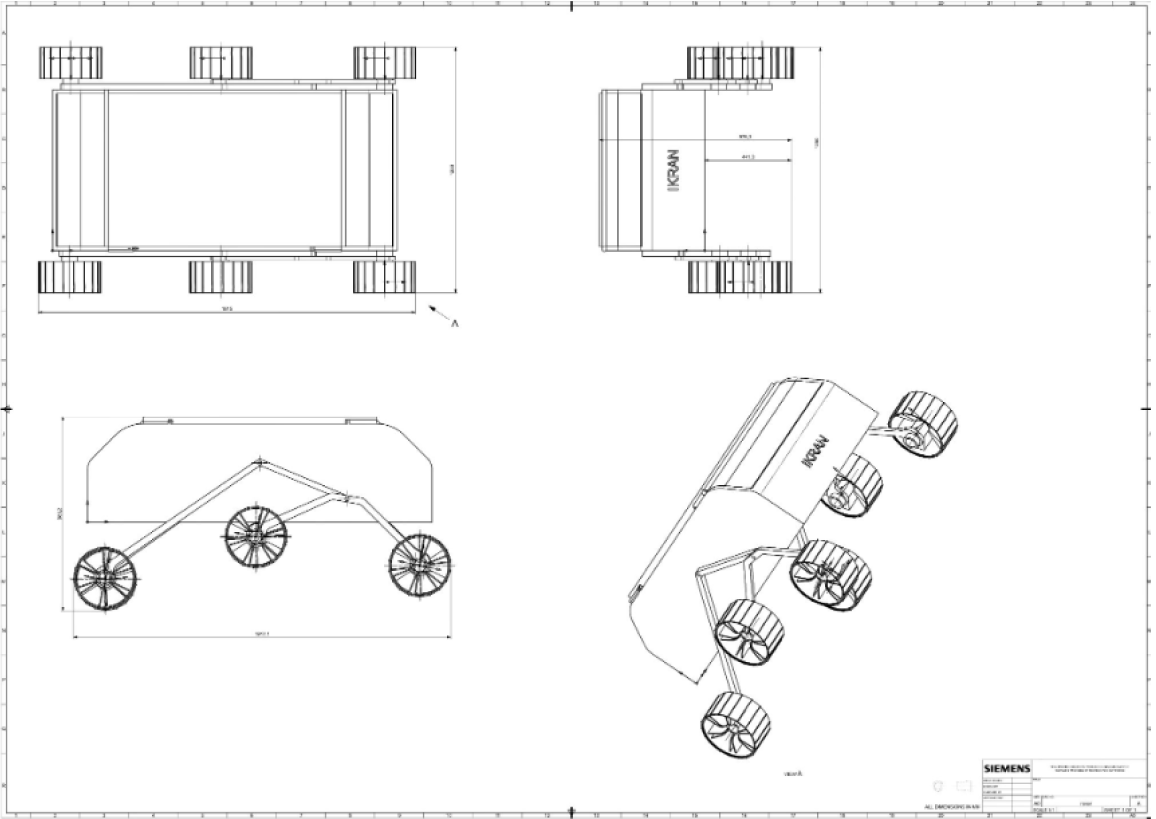
The H.A.R.V.E.S.T. Rover is built on a rocker-bogie suspension system, which enables efficient traversal of rough lunar terrain.
Key specifications:
- Height: 0.986m
- Length: 1.971m
- Width: 1.250m
- Mass: 350 kg
- Power Consumption: 2,520 W
The design prioritizes mobility, durability, and adaptability for extended exploration and data collection in extreme lunar conditions.
Vehicle Design Overview
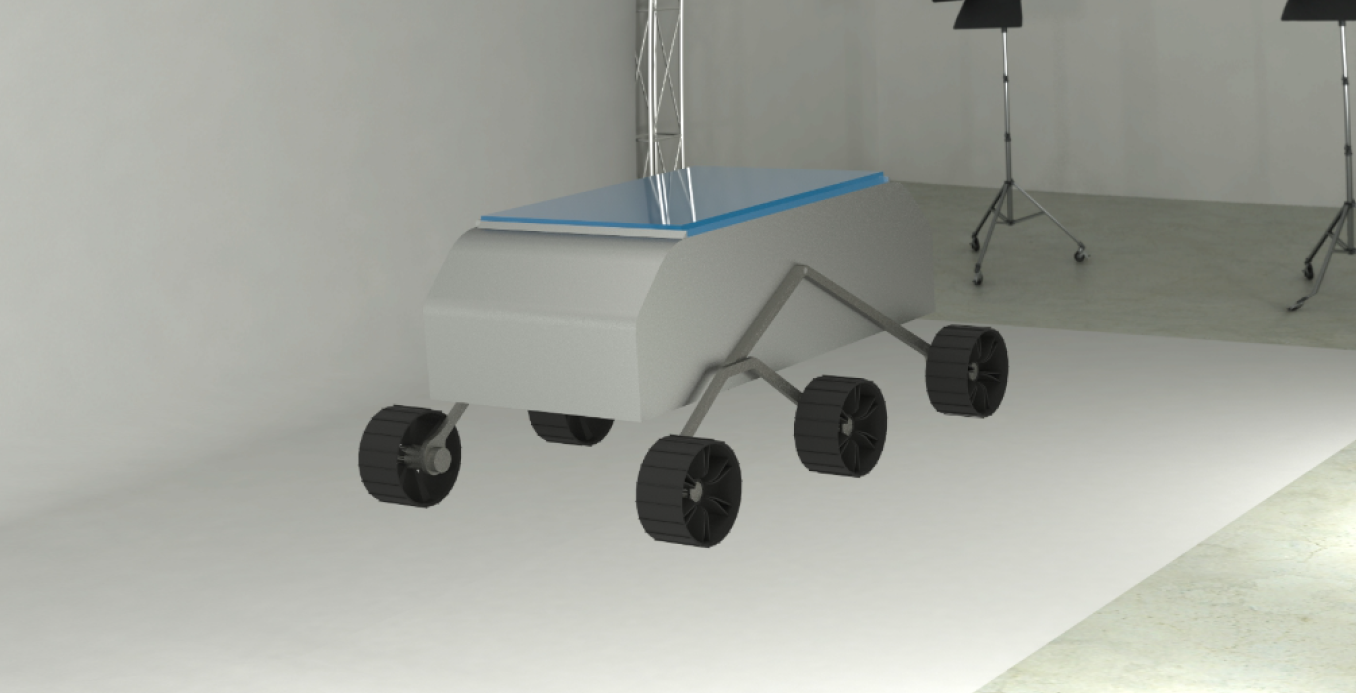
Mechanical System: Inspired by the Curiosity Rover, the wheel design mitigates regolith accumulation and withstands temperature fluctuations.
Power System: Solar panels and battery storage ensure continuous operation. Batteries are shielded from temperature variations to prevent degradation.
Thermal System: Passive and active heat management prevents overheating and cold-soaking of critical components.
Computing and Data Handling (CDH): The system is radiation-shielded to prevent data corruption and ensures reliable storage and transmission of mission data.
Mechanical and Power Systems
H.A.R.V.E.S.T. is equipped with advanced instruments to study the lunar surface and subsurface:
- ChemCam (LIBS): Determines regolith composition via Laser-Induced Breakdown Spectroscopy.
- CheMin: Analyzes mineral content for resource utilization.
- RIMFAX (GPR): Ground-penetrating radar for subsurface geological mapping.
- LiDAR: Generates 3D terrain maps of the lunar pit interior.
- Thermal Imager: Monitors surface and subsurface temperature fluctuations.
- Radiation Monitor: Assesses habitability by measuring radiation exposure.
- Seismometer: Evaluates structural stability and profiles lunar seismic activity.
These instruments will provide critical data for future lunar missions, aiding in site selection for potential human settlements.
Science Instrumentation and Payload